
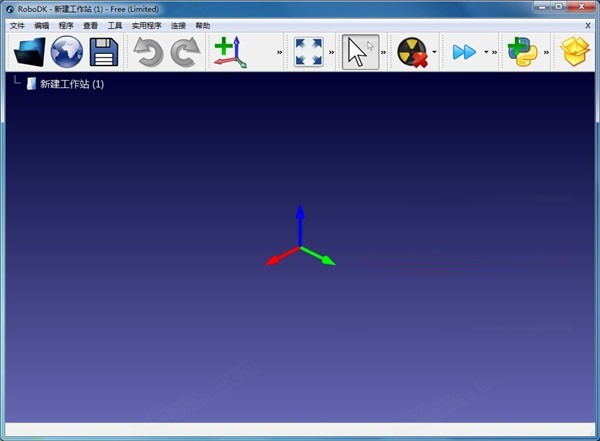
RoboDK是一个功能强大的机器人离线编程软件,可以用于工业机器人、协作机器人、仿人形机器人的离线编程,优化工具可全自动转换辅助设计生产加工(CAM)程序流程,形成机器人程序流程!想要深入学习的话,就快来下载使用这款软件吧!
软件特色
简单易用:RoboDK软件具有直观的用户界面,用户可以快速搭建虚拟工作环境、创建坐标系、设定机器人运动轨迹及目标等,不需要学习复杂的编程语言。
支持多种机器人:RoboDK软件包含一个丰富的机器人模型库,可以支持多种品牌和型号的工业机器人、协作机器人、仿人形机器人等。
多种编程语言支持:RoboDK软件支持多种编程语言,包括Python、C++、Java等,用户可以根据需要选择不同的编程语言进行离线编程。
强大的仿真功能:RoboDK软件可以进行机器人仿真,可以模拟机器人的实际运行效果,帮助用户进行机器人路径规划和优化。
丰富的功能扩展:RoboDK软件还支持多种功能扩展,例如视觉识别、力矩控制等,可以满足不同领域的应用需求。
软件优势
1、离线编程
工业机器人离线编程与仿真从未如此简单。直观的用户界面,便于搭建虚拟工作环境,创建坐标系,设定机器人运动轨迹及目标,为多种工业应用预先进行离线编程。
您不再需要学习由各机器人品牌所决定的复杂编程语言。
2、机器人加工
把您的机器人变成一台5轴数控铣削加工机床(CNC)或者3D打印机!仿真并将数控程序(G-code,APT或DXF等程序文件)转化为机器人程序文件。将自动优化机器人轨迹,避免奇异状态(singularities)及轴极限,躲避障碍。
3、机器人模型库
RoboDK的机器人模型库包含来自20多个品牌的工业机器人、机器人外轴以及工业工具。您可以轻松使用任一款机器人,实现任何应用,包括:加工,焊接,切割,喷涂,检测,去毛刺,以及更多。
4、机器人校准
您的机器人不够精确?
机器人校准功能可以提高机器人精确度、改进生产。运行ISO9283机器人性能测试。利用球杆仪测试来验证您的机器人。
5、输出程序到您的机器人
软件的后处理器(Post Processors)支持多种机器人控制器,包括:
ABB RAPID(mod/prg)
Fanuc LS(LS/TP)
Kuka KRC/IIWA(SRC/java)
Motoman Inform(JBI)
Universal Robots(URP/script)
软件亮点
1、取放
简单的拾取与放置仿真。
2、使用Python取放
这个范例演示了如何使用Python来实现取放
3、机器人绘图
用你的机器人仿真绘制SVG图像文件,在项目中使用来自第三方的Python库。
4、机器人铣削
把你的机器人变成CNC,轻松导入NC-code(G-code或APT),生成机器人程序文件。
5、自动传送带
仿真机械传送带以及任何类似的机械装置,使用Python应用程序编程接口。
6、DXF到机器人程序文件
将DXF图形文件转化成机器人程序文件。
7、使用机器人外轴铣削
同步机器人与外轴进行铣削。
8、喷涂
生成机器人路径进行喷涂或者质量检测。
9、点焊
在软件中简单实现点焊与钻孔
10、3D打印
使用工业机器人实现3D打印的简单步骤
11、2D相机仿真
在自动生产线中嵌入2D相机进行视觉检测。
12、离线编程
离线编程意味着在生产线外进行机器人编程。离线编程避免了在线编程导致的生产“停机”时间,通过离线编程与仿真可以更好地调试与规划工作空间、避免出错。
用合适的仿真器进行离线编程将最大化机器人系统的投资回报率。给机器人设计新任务所需要的时间由数周缩短到数天,短期生产也可实现“机器人化”。
13、用RoboDK实现离线编程
使用该软件进行离线编程没有限制。该软件友好的用户图形界面方便了工业机器人仿真。应用程序编程接口(API)意味着您可以使用Python给机器人编程。该软件支持多种品牌的机器人控制器,给您的机器人输出相应的程序文件。您还可以根据需要编辑后处理器(Post Processor)。
Python让您更快、更有效地整合您的系统。相较于其他编程语言来说,Python更简单有效,并且容易学习。版本Python 3.7.3将随程序自动安装。
该软件用于Python的应用程序编程接口(API)参考资料以及范例在这里。该软件的应用程序编程接口(API)与C(包括范例)以及Matlab也兼容。
14、机器人后处理器(Post Processor)
后处理器负责生成机器人程序文件。仿真中的任意机器人状态可由后处理器转化为相应的机器人指令。后处理器可以灵活满足生成机器人程序文件时的特定要求。
该软件为多数机器人品牌建立了后处理器。我们也可以根据需要生成适合您的后处理器。
安装步骤
1.在本站下载机器人仿真软件官方版的安装包,解压后,双击exe程序,进入安装向导,单击下一步
2.阅读许可协议,单击我接受
3.选择安装的组件,单击下一步
4.点击“浏览”选择安装文件夹,一般默认安装在电脑C盘,推荐安装在D盘,单击安装
5.软件正在安装,请耐心等待
6.机器人仿真软件安装完成,单击完成退出安装向导
∨ 展开
 highlight代码高亮
highlight代码高亮 Scylla
Scylla AutoFlowchart
AutoFlowchart 滑稽编程助手
滑稽编程助手 Java SE Runtime Environment 7.0
Java SE Runtime Environment 7.0 GX Works2 仿真软件
GX Works2 仿真软件 Visual Assist X vs2017 破解
Visual Assist X vs2017 破解 visual assist 2013免注册
visual assist 2013免注册 PC Logo电脑版
PC Logo电脑版 SonarLint Eclipse
SonarLint Eclipse PostScript软件
PostScript软件 MKScript脚本解释器
MKScript脚本解释器 MKScript绿色版
MKScript绿色版 Sublime Text4中文版
Sublime Text4中文版 PeStudio
PeStudio PilotEdit 中文破解
PilotEdit 中文破解 PeStudio中文版
PeStudio中文版 MKScript(鼠标键盘自动化脚本解释器)
MKScript(鼠标键盘自动化脚本解释器) TortoiseSVN 64位
TortoiseSVN 64位

 plc编程软件
plc编程软件 三菱PLC编程软件 GX Developer中文完整版
三菱PLC编程软件 GX Developer中文完整版 step7
step7 欧姆龙plc编程软件
欧姆龙plc编程软件 东芝plc编程软件
东芝plc编程软件 Python开发工具
Python开发工具 Google App Engine SDK for Python
Google App Engine SDK for Python Python IDE Windows
Python IDE Windows Python 2.7 64位
Python 2.7 64位 Python For Windows
Python For Windows python3.3中文手册
python3.3中文手册 Python tools for visual studio 2013
Python tools for visual studio 2013 pyside(python pyside)For Windows
pyside(python pyside)For Windows Spyder(Python开发环境)
Spyder(Python开发环境) C语言编程软件
C语言编程软件 Visual Studio 2010 旗舰版
Visual Studio 2010 旗舰版 Microsoft Visual Studio 2005 SP1
Microsoft Visual Studio 2005 SP1 Microsoft Visual Studio 2008
Microsoft Visual Studio 2008 Visual Studio 6.0
Visual Studio 6.0 Visual Studio 2012专业版
Visual Studio 2012专业版 Visual Studio 2012 Ultimate
Visual Studio 2012 Ultimate Visual Studio 2013
Visual Studio 2013 Visual Studio 2013 Professional
Visual Studio 2013 Professional Mind+编程软件
Mind+编程软件 河小象编程电脑版
河小象编程电脑版 核桃编程
核桃编程 Error Lookup编程工具
Error Lookup编程工具 蓝鸟编程破解
蓝鸟编程破解 Kittenblock(机器人编程软件)
Kittenblock(机器人编程软件) Cygwin(unix模拟环境) 1.7.3 最新版
Cygwin(unix模拟环境) 1.7.3 最新版 ThinkPHP(PHP开发框架) 3.1.3 完整版
ThinkPHP(PHP开发框架) 3.1.3 完整版 RStudio中文版 1.1.383 桌面版
RStudio中文版 1.1.383 桌面版 Spring框架 4.3.12 正式版
Spring框架 4.3.12 正式版 Spring Framework J2EE框架 4.3.12 正式版
Spring Framework J2EE框架 4.3.12 正式版 winhex专业单文件版 18.7 SR-2 汉化破解
winhex专业单文件版 18.7 SR-2 汉化破解 TinyMCE编辑器 4.1.5 中文
TinyMCE编辑器 4.1.5 中文 xml文件编辑器 2.2 绿色免费版
xml文件编辑器 2.2 绿色免费版 Microsoft Windows SDK 7.1 最新版
Microsoft Windows SDK 7.1 最新版