

iRobotQ 3D是全球首款基于网络的机器人教育和创新设计平台。平台通过虚拟现实技术,将机器人教育和设计的各个应用细节进行高度的三维仿真,实现三维世界里的任务场景设计、智能体构建、行为设计、运动模拟和组织评价等功能。丰富的智能组件库和和简便的行为设计系统,带你走进精彩的人工智能世界,创造你的的智慧未来。
萝卜圈虚拟机器人软件简介
Robokid萝卜圈虚拟机器人是一款优秀的3D机器人在线图片编程工具,专为青少年设计的三维虚实融合机器人创造系统,为用户供本地机器人即时仿真管理服务条件。该软件采用了可视化图片编程系统,能够为用户们提供一个相当的具有创造性的设计平台,同时它还支持JAVA等各种外部的编程平台,能够帮助用户尽情地发挥出自己的想象力和技术水平
萝卜圈虚拟机器人软件特色
1、基于收集的运用形式
缔造性地提出了基于收集的运用形式,将极大下降了领会、运用机械人及智能节制功能的门坎。
2、物理引擎强力支持
物理引擎对机械人仿真意义严重,可以完成传神的实际物理活动摹拟,机械人项目标立异才能及学科常识整合才能将极大加强。
3、开放的项目设计和办理
运用平台供给的各类积木布局,你尽可以构建布满创意的机械人模型。
4、立异的驱动和传感世界
由于有了物理引擎的拥有,平台供给了各类各种物理力学属性的驱念头构,能让你的机械人应对各类繁琐的物理情况和义务。
5、聪明的可视化编程系统
尺度化、拖沓式、模块化的可视化图形编程系统,人道化的智能婚配式联想性能,操作变得更简洁,让你更专注于处理成绩的方式,其他的由他为你揭示。
萝卜圈虚拟机器人使用教程
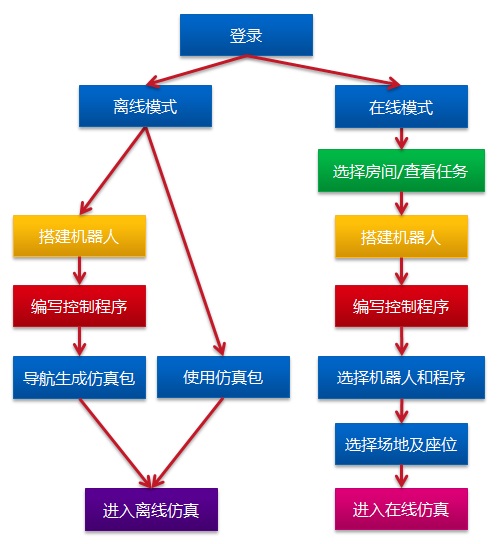
登录
启动完毕后,登录窗口如图所示。在登录窗口上输入用户名、密码,选择服务器, 选择登录模式为离线模式,单击“Go!”开始登录,登录完毕后进入离线模式主窗口。
离线模式
离线模式主窗口如图所示,在离线模式下可进行构建场景、构建机器人、编写程序、开始仿真、资源管理、切换到在线模式等。
教程任务
此教程完成“训练-轨迹”任务需要的机器人和控制程序,任务场景如图 4。任务要求: 机器人从起始区出发,沿轨迹线行走到终点,碰到放在终点的足球时完成任务, 机器人在行走过程中脱离轨迹线视为任务失败。
窗口布局
萝卜圈虚拟机器人编辑器窗口布局
模型面板:包含机器人所有模型分类。
模型分类:包含控制器、驱动、安装块、传感器和其它5大类模型分类。
模型列表:列出各个模型分类中所有模型。
工作台:工作台以树形列表显示所有添加到编辑区中的模型,及它们之间的关系。
模板列表:显示用户创建的模板,模板可保存经常使用的模型组合。
菜单工具栏:有文件、功能和操作3个菜单,菜单下有相应的工具栏命令。
属性面板:设置直流电机、伺服电机、传感器的属性。
备注:编辑和查看机器人的用户备注信息。
机器人信息:查看机器人零部件的数量,机器人的重量、尺寸等信息。
机器人编辑区:编辑区是构建机器人的操作区,完成机器人零部件的安装等操作。
视角面板:调整查看编辑区的视角,完成视角的环绕、缩放、平移等操作。
更新日志
新增使用仿真控制台
新增增加了一些模型
修复修复保存文件上的一个问题
新增自动云存储,无需手动同步(校园网平台须服务端支持,官方服务器默认支持)
新增可以编辑服务端收到的官方推送场景,并回传到服务端(校园网平台支持) 查看相关帮助
新增使用官方服务器时,资源管理的官方作品中,可以收到来自官方推送的场景/机器人/程序
新增官方服务器增加第三方登录功能,可以使用QQ等第三方账号登录
新增增加了智能代码缩进,改进python编程体验
新增登录界面可以修改服务器地址
新增大厅界面增加了场景编辑
修复仿真多次(>50)重置时,改善响应速度
修复某些显卡上容易出现失去响应的情况
修复其他一些模型上的问题
∨ 展开
 E雕天下电脑版
E雕天下电脑版 简道云电脑版
简道云电脑版 易批注软件
易批注软件 美弘泰家政服务管理系统
美弘泰家政服务管理系统 资料易进度计划软件
资料易进度计划软件 QQ网吧网关管理端
QQ网吧网关管理端 商家工具箱软件
商家工具箱软件 华佳办公助手
华佳办公助手 智群管家
智群管家 智和网管平台最新版
智和网管平台最新版 矿工管家MinerOS
矿工管家MinerOS BaKoMa TeX
BaKoMa TeX 中诚ERP企业管理软件
中诚ERP企业管理软件 TASKCTL作业调度工具
TASKCTL作业调度工具 威德企业管理软件
威德企业管理软件 管家婆工贸ERPT9
管家婆工贸ERPT9 福沃德智能数据管理软件
福沃德智能数据管理软件 梵讯房屋管理系统新版本
梵讯房屋管理系统新版本 制造云技术资源库
制造云技术资源库 QFD质量功能展开
QFD质量功能展开 机械设计常用软件
机械设计常用软件 AutoCAD2024
AutoCAD2024 中望3D 2024(64位)
中望3D 2024(64位) 浩辰3D 2024
浩辰3D 2024 中望3D 2024 X 32位版
中望3D 2024 X 32位版 中望3D 2024(32位)
中望3D 2024(32位) 中望3D 2024 X 64位版
中望3D 2024 X 64位版 Autocad2014 64位破解
Autocad2014 64位破解 中望3D 2023中文永久激活版
中望3D 2023中文永久激活版 设计图纸软件
设计图纸软件 中望CAD 2024(32位)
中望CAD 2024(32位) 中望CAD 2024(64位)
中望CAD 2024(64位) AutoCAD LT 2023简体中文版
AutoCAD LT 2023简体中文版 AutoCAD 2023精简版
AutoCAD 2023精简版 CorelCAD2021 32位 中文免费版
CorelCAD2021 32位 中文免费版 CorelCAD2021 64位中文版
CorelCAD2021 64位中文版 工程建筑设计软件
工程建筑设计软件 中望结构2023
中望结构2023 Autodesk Civil 3D 2022 绿色版
Autodesk Civil 3D 2022 绿色版 Autodesk Civil 3D 2023 绿色版
Autodesk Civil 3D 2023 绿色版 Autodesk Revit LT 2022
Autodesk Revit LT 2022 电工实训仿真教学工具
电工实训仿真教学工具 ANSYS Lumerical光学仿真
ANSYS Lumerical光学仿真 NxShell终端仿真软件
NxShell终端仿真软件 斯沃数控仿真软件破解中文版
斯沃数控仿真软件破解中文版 GX Works2 仿真软件
GX Works2 仿真软件 LTspice电路仿真软件 v4.14r 汉化破解
LTspice电路仿真软件 v4.14r 汉化破解 LTspice电路仿真
LTspice电路仿真 proteus单片机模拟仿真软件
proteus单片机模拟仿真软件 GraphPad Prism 8 8.0 绿色版
GraphPad Prism 8 8.0 绿色版 指北针百度知道软件 1.5.4.10 绿色版
指北针百度知道软件 1.5.4.10 绿色版 99宿舍客服系统 4.2.2.0 最新免费版
99宿舍客服系统 4.2.2.0 最新免费版 蒲公英应用平台 1.0.2 pc桌面版
蒲公英应用平台 1.0.2 pc桌面版 个人存量房交易税收征管系统 20160229 最新版
个人存量房交易税收征管系统 20160229 最新版 大师配煤软件 2.4 最新免费版
大师配煤软件 2.4 最新免费版 707化工工具箱 2.0 最新免费版
707化工工具箱 2.0 最新免费版 淘宝秒杀器 1.2 绿色免费版
淘宝秒杀器 1.2 绿色免费版 一片云验证码平台 6.4 最新版
一片云验证码平台 6.4 最新版 税务总局电子申报软件 4.7.19.1105h 单机版
税务总局电子申报软件 4.7.19.1105h 单机版